Inhaltsverzeichnis
Steuerung der CCD mit CCDOPS
Vorbereitung
Anbringen und Verbindung mit dem Rechner
Die CCDs lassen sich mittels der Software CCDOPS vom Rechner aus bedienen. Das Programm kann man vom Desktop aus durch klicken auf das CCCDOPS-Symbol starten.
Ist das Programm gestartet, muss zunächst über das Menü eine Verbindung mit der jeweiligen Kamera hergestellt werden. Dazu wählt man:
Camera -> Establish COM Link
Bei erfolgreicher Verbindung sollten am unteren Rand Informationen zu Art der Kamera, Auflösung, Temperatur (Auslastung der Kühlung in %) und gegebenenfalls Filter zu erkennen sein.
Einstellen der Temperatur
Zur Minderung des thermischen Rauschens lassen sich die CCDs mittels Peltier-Element auf bis zu 30°C unter Umgebungstemperatur kühlen. Zur Einstellung der Kühlung gelangt man im Menü von CCDOPS folgendermaßen:
Camera -> Setup
Im sich darauf öffnenden Fenster (sh. Abbildung) wählt man unter dem Punkt Temperature Regulation die Option Active und gibt im Feld Setpoint die Temperatur ein, auf die die CCD heruntergekühlt werden soll. Es ist möglich, die CCD auf eine Temperatur zu kühlen, die 30°C unter der Umgebungstemperatur liegt. Jedoch sollte man darauf achten, dass das Kühlelement nicht dauerhaft unter Volllast (100% in der Kühl-Anzeige) läuft. Eine kleinere Differenz zwischen Umgebungs- und Kühltemperatur ist daher vorzuziehen.


Binning
Die Kameras sind in der Lage mehrere physikalische Pixel zu größeren „Bildpixeln“ zusammenfassen. Diese Option ist insbesondere bei lichtschwachen Objekten und schlechtem Seeing hilfreich, da sie das Signal-Rausch-Verhältnis erhöht. Das Binning kann im Kamera-Setup unter
Camera -> Setup
eingestellt werden. Für ein 3×3-Binning muss 3xN unter Resolution Mode ausgewählt sowie bei Vertical N Binning eine 3 eingetragen werden. Die Kamera fasst damit 9 Pixel zu einem zusammen.
Fokussieren
Zum Fokussieren der CCD-Kameras nutzt man die Funktion Focus im Camera-Menü:
Camera -> Focus
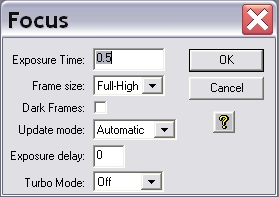
Die Einstellungen sollten denen auf dem linken Bild ähneln. Mit dieser Funktion wird wiederholt eine Aufnahme mit der Belichtungszeit (Exposure Time) in diesem Fall von 0.5s gemacht. Die Aufnahmen werden automatisch geladen und dargestellt. Nun kann mithilfe des Fokussierrades am Teleskop grob fokussiert werden. Anschließend sollte der Feinfokus mit der Fokussiereinheit durchgeführt werden. Es empfiehlt sich für den Grobfokus ein hellen Stern anzufahren und so zu fokussieren, dass der Beugungsring verschwindet. Für den Feinfokus kann z.B. ein Kugelsternhaufen verwendet werden. Mehr zum Fokussieren findet sich hier.
Aufnahme von Bildern
Das Grab-Menü
Das Grab-Menü stellt Funktionen zum Aufnehmen von einzelnen Aufnahmen und Aufnahmeserien bereit. Es wird über
Camera -> Grab
aufgerufen. Es erscheint das folgende Fenster, indem alle Einstellungen für die Aufnahmen vorgenommen werden.
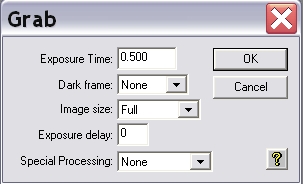
- Bei Exposure Time ist die Belichtungszeit in Sekunden einzutragen.
- Unter Dark frame kann ausgewählt werden, ob kein (None) oder nur (Only) Dark frames erstellt werden sollen.
- Eine eventuelle Auslöserverzögerung ist bei Exposure delay einzutragen.
- Für Aufnahmeserien ist bei Special Processing Auto Grab zu wählen.
Aufnahmeserie
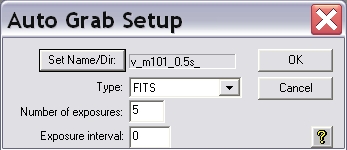
Für eine Serie von Aufnahme ist Auto Grab bei Special Processing auszuwählen. Mit einem Klick auf OK erscheint das neue Fenster „Auto Grab Setup“ (siehe unten).
 In diesem Fenster sind unter Number of exposures die Anzahl der Aufnahmen einzugeben. Im Beispiel wird eine Aufnahmeserie mit 5 Aufnahmen gemacht. Wichtig ist dabei, dass bei Set Name/Dir der Speicherort der FITS-Dateien ausgewählt wird. Ebenfalls ist dort der Name der Dateien zu wählen. Der Name der Dateien sollte alle wichtigen Information enthalten. Im Beispiel „v_m101_0-5s_“ wurden Aufnahmen im V-Band von M101 mit einer Belichtungszeit von 0,5s gemacht. Wichtig dabei ist der letzte Unterstrich. CCDOPS fügt bei bei den Aufnahmen eine fortlaufende Zahl an, die der aktuellen Aufnahme entspricht. Im Beispiel würden dann die Dateien „v_m101_0.5s_1.fits“, „v_m101_0.5s_2“, … erstellt werden. Mit einem Klick auf
In diesem Fenster sind unter Number of exposures die Anzahl der Aufnahmen einzugeben. Im Beispiel wird eine Aufnahmeserie mit 5 Aufnahmen gemacht. Wichtig ist dabei, dass bei Set Name/Dir der Speicherort der FITS-Dateien ausgewählt wird. Ebenfalls ist dort der Name der Dateien zu wählen. Der Name der Dateien sollte alle wichtigen Information enthalten. Im Beispiel „v_m101_0-5s_“ wurden Aufnahmen im V-Band von M101 mit einer Belichtungszeit von 0,5s gemacht. Wichtig dabei ist der letzte Unterstrich. CCDOPS fügt bei bei den Aufnahmen eine fortlaufende Zahl an, die der aktuellen Aufnahme entspricht. Im Beispiel würden dann die Dateien „v_m101_0.5s_1.fits“, „v_m101_0.5s_2“, … erstellt werden. Mit einem Klick auf OK wird die Aufnahmeserie gestartet.
Wichtig ist dabei, dass im Dateinamen kein Punkt vorkommt. Ansonsten interpretiert CCDOPS alles ab dem Punkt als Dateiendung!
Filter
Für die ST-8300 und die ST-7 bzw. dir ST-8 steht jeweils ein Filterrad mit unterschiedlichen Filtern zur Verfügung. Informationen zu den jeweils verbauten Filtern können hier gefunden werden.
Zu den verbauten Filter zählen sowohl Breitband- als auch Schmalbandfilter. Die Breitbandfilter (U, B, V, R, I) können z.B. genutzt werden um RGB-Aufnahmen von Deep-Sky-Objekten zu erstellen. Die Schmalbandfilter (Hα, Hβ, S II, O III) sind z.B. bei Beobachtungen von Nebeln interessant, da diese Filter meistens genau auf Nebelemissionslinien zentriert sind. Der Hα-Filter eignet sich z.B. auch zur Identifizierung von Sternentstehungsgebieten in Galaxien.
Guiding
ST-7 und ST-8

Sowohl die ST-7 als auch die ST-8 besitzen neben dem CCD-Sensor (Imaging-CCD) zur Registrierung der eigentlichen Aufnahme einen weiteren CCD-Sensor (Tracking-CCD) welcher für die Nachführung des Teleskops genutzt werden kann. Der Tracking-CCD befindet sich von CCDops aus gesehen über dem Imaging-CCD. Beide CCD-Chips lassen sich mittels der Dualview-Option auch parallel einsetzen, was besonders bei der Auffindung eines geeigneten Guidsterns hilfreich sein kann. Zu erreichen ist dieser Betriebsmodus über:
Camera -> Dual CCD View
STF8300M
Im Gegensatz zu der ST-7 bzw. der ST-8 erfolgt das Guiding bei der STF8300M nicht über einen internen Tracking-CCD sondern mittels eines sogenannten Off-Axis-Guider, welcher über einen kleinen Spiegel einen Teil des Lichtes seitlich aus dem Strahlengang ausleitet. Als Guiding-Kamera wird die ST-i verwendet. Der Vorteil hierbei ist, dass der Guider vor dem Filterrad sitzt und daher auch schwächere Sterne zum guiden verwendet werden können, da deren Intensität nicht durch die Filter abgeschwächt wird. Wie bei der ST-7 und der ST-8, befindet sich die CCD der ST-i in der CCDops-Darstellung oberhalb der STF8300M-CCD und zwar im Abstand von ungefähr 8'. Um die ST-i und die STF8300M gleichzeitig betreiben zu können ist eine zweite CCDops-Session notwendig welche mittels
File -> Launch 2nd CCDops...
gestartet werden kann.
Guiding-Varianten
Im Prinzip sind drei unterschiedliche Einsatzmöglichkeiten des Tracking-CCDs verfügbar. Im sogenannten Track and Accumulate Modus werden in kurzer Folge Aufnahmen erstellt, zueinander ausgerichtet und aufaddiert ohne dabei das Teleskop aktive nachzuführen. Im Autoguide Modus kann die Kamera als separater Autoguider eingesetzt werden, was vorallem für die STF8300M interessant ist. Der Self Guide Modus ermöglicht das gleichzeitige Aufnehmen mittels des Imaging-CCDs und das Nachführen des Teleskops über den Tracking-CCD und ist daher nur für die ST-7 und die ST-8 sinnvoll.
Vorbereitung
Die Kommunikation zwischen der Kamera und der Montierung erfolgt über ein separates Kabel, welches vor der Beobachtung erst installiert werden muss.
ST-7/ST-8



Für die ST-7 und ST-8 ist besagtes Kabel ist mit einem RC-7 Stecker ausgestattet und muss mit dem freien AO7 CFW8 SCOPE Port der Kameras verbunden werden [2]. Achtung, die Kamera kann beschädigt werden, falls fälschlicherweise die Verbindung zum 12C AUX Port hergestellt wird. Das andere Ende des Kabels (der RJ-Stecker) muss mit dem GUIDER-Port der Montierung verbunden werden [3].
STF-8300


Bei der STF8300 hat das Kabel zwei Modularsteckern (RJ-Stecker) [4]. Einer dieser Stecker muss mit dem Port der ST-i [5] verbunden werden. Der zweite Stecker gehört in den GUIDER-Port der Montierung [6] wie bei den anderen Kameras.
Kalibrierung
Bevor die Trackingfunktionen der Kamera genutzt werden können muss zuerst das Zusammenspiel mit dem Teleskop kalibriert werden. Hierfür muss ein Kalibrationsstern ausgewählt werden, welcher deutlich heller als alle anderen Sterne in der näheren Umgebung ist, damit dieser von CCDOPS eindeutig identifiziert werden kann. Es ist dabei unerheblich, ob der Stern sich auf dem Imaging-CCD oder dem Tracking-CCD befindet, da die Kalibration mit beiden möglich ist. Zu beachten ist nur, dass der Kalibrationsstern sich mittig auf dem jeweiligen CCD befindet. Die Kalibration kann über den folgenden Menüpunkt erreicht werden:
Track -> Calibrate...

Es muss die Belichtungszeit, die zeitliche Verschiebung in X- und Y-Richtung, die aktuelle Deklination, die Anzahl der Verschiebungen sowie der CCD-Chip ausgewählt werden. Die Belichtungszeit sollte nicht zu kurz gewählt werden, damit der Kalibrationsstern von CCDOPS eindeutig identifiziert werden kann. Die zeitliche Verschiebung in X- und Y-Richtung sollte ebenfalls nicht zu gering sein, um sicher zu stellen, dass die angewendete Verschiebung ungefähr 100 Pixel auf dem CCD-Chips entspricht, was eine exakte Kalibrierung sicherstellen sollte. Unter Steps kann eingestellt werden in wie viel Einzelverschiebungen die zeitliche Verschiebung in die X- und Y-Richtung gesplittet werden soll. In unserem Fall kann dieser Wert auf eins belassen werden. Durch die Angabe der Deklination ist es möglich die Kablibration an einem beliebigen Stern durchzuführen. Die auf diese Weise erzielten Resultate werden dann entsprechend skaliert, sodass sie auch für die Deklination des eigentlichen Beobachtungsobjektes gültig sind. Die folgende Abbildung gibt Aufschluss über das Resultat des Kalibrationsversuches. Ist die Bewegungen in +X- und -X-Richtung bzw. in +Y- und -Y-Richtung jeweils ungefähr gleich groß (wird also näherungsweise die jeweilige Ausgangsposition erreicht) hat man eine gutes Kalibrationsergebnis erzielt. Die Achsen im unteren rechten Teil dieser Abbildung müssen nicht zwangsläufig horizontal bzw. vertikal verlaufen um ein exaktes Tracking sicherzustellen.

Weitere Parameter des Nachführvorgangs können unter
Track -> Autoguide Parameters...
eingestellt werden. Active Relays gibt die Richtungen an, welche aktiv Nachgeführt werden. Die X Direction muss zwischen Forward und Reverse umgeschaltet werden, falls das Teleskop von einer Seite des Meridians zur anderen wechselt. Mit der Aggressiveness lassen sich die an das Teleskop übermittelten Korrekturen entweder dämpfen oder auch verstärken. Ohne Dämpfung arbeitet die Nachführung wenn eine Aggressiveness von 10 gewählt, während bei 5 nur 50% der Korrekturen auch angewendet werden. Die unterschiedlichen Noise Filter können hilfreich sein falls der Nachführstern relativ dunkel ist. Mittels Log Tracking können die angewendeten Korrekturen gespeichert werden um sie später auszuwerten. Der X- und Y-Backlash kann bei unserer Montierung auf 0 belassen werden. Die Einstellungen Minimum move und Maximum move geben Aufschluss über die kleinste bzw. größte Korrektur und können in der Regel ebenfalls auf den Standardwerten belassen werden.

Self-Guiding
Der häufigste Anwendungsfall für die Trackingfunktionalität der ST-8 bzw. der ST-7 wird das Selfguiding sein, bei dem eine lange Aufnahme mittels des Imaging-CCD erfolgt wären dessen das Teleskop über den Tracking-CCD nachgeführt wird. Das Aufrufen des Self-Guide-Modus erfolgt über:
Track -> Selfguide...


Unter Exposure time ist die angepeilte Belichtungszeit für den Imaging-CCD anzugeben. Die Track time gibt die Belichtungszeit für den Tracking-CCD an und sollte so kurz wie möglich sein (in der Regel 0.5 bis 2 Sekunden) um eine bestmögliche Nachführung gewährleistet zu können aber auch lang genug damit der „Nachführstern“ eindeutig von CCDOPS identifiziert werden kann. Declination sollte ungefähr der aktuellen Deklination des zu beobachtenden Objektes entsprechen. Image Size gibt die Auflösung des Imaging-CCD an. Unter Guide to kann an gegeben werden wie das Nachführen erfolgen sollen. Centroid ermöglicht das Nachführen auf die Position wo der Nachführstern ist, wohingegen unter der Einstellung Cursor das Nachführen auf einen beliebigen Pixel erfolgen kann. Nach einem Klick auf OK muss auf der dann erstellten Aufnahme noch der Stern (muss nicht der hellste sein) bzw. das Pixel markiert werden auf den nachgeführt werden soll. Nach einem weiten Klick auf Resume startet der Nachführprozess. Ist man mit der Nachführperformance zufrieden kann mittels Start die Belichtung des Imaging-CCD gestartet werden.

Das obige Menü gibt Aufschluss über statistische Informationen des Nachführvorgangs und ermöglicht diesen zu kontrollieren. Unter Statistics erhält man Informationen über die Verschiebung in X- und Y-Richtung in Pixel, die Helligkeit integriert über die Nachführbox sowie die Rate der Nachführaufnahmen. Die sich anschließenden Graphen geben Aufschluss über die zeitliche Änderung der in X- und Y-Richtung registrierten Verschiebungen. Im unteren Teil wiederum kann das Fortschreiten des Belichtungprozesses des Imaging-CCD verfolgt werden. Sollte der Nachführstern aus der Nachführbox herauslaufen wird die Belichtung automatisch abgebrochen und die bis zu diesem Zeitpunkt gesammelten Informationen aus dem Imaging-CCD ausgelesen.
Auto-Guiding
Sehr ähnlich zum Selfguiding ist das Autoguiding, welches bei der STF-8300 in Kombination mit der ST-i zum Einsatz kommt. Hierbei wird das Teleskop über die ST-i nachgeführt während die eigentliche Aufnahme über die STF-8300 erstellt wird. Darueber hinaus kommt das Autoguiding zum Einsatz wenn ein Objekt mittels Guiding auf dem Spalt eines unserer der Spektrographen gehalten werden soll. Nach dem Starten der zweiten CCDops-Session, dem Verbinden der ST-i mit dem Rechner, sowie der oben beschriebenen Kalibrierung kann über
Track -> Autoguiding...
das Autoguiding gestartet werden. Das anschließende Vorgehen entspricht dem unter Selfguiding beschriebenen Verfahren.
Self-Guiding mit der AO-7
Für die ST-7 und die ST-8 steht die adaptive Optik AO-7 zur Verfügung, welche über einen Spiegel verfügt der entlang zweier Achsen geneigt bzw. gekippt werden kann. Mit der AO-7 ist es möglich die Ungenauigkeiten der Nachführung sowie teilweise Seeing bedingte Einflüsse zu korrigieren. Im Gegensatz zum Standard Auto- bzw. Sefl-Guiding der ST-7 oder ST-8 ermöglicht die AO-7 deutlich höher frequente Korrekturen ohne dabei auf die Guidingfähigkeit der Montierung zurück greifen zu müssen.
Setup
Das Setupmenü der AO-7 ist zu erreichen über:
AO -> Setup...

Die Aggressiveness-, die Noise Filter- und die Log Tracking-Option verhalten sich genauso wie deren Äquivalente aus dem Standardguiding (siehe oben). Die Slew rate bietet neben der Aggressiveness eine weitere Möglichkeit die Stärke der Korrekturen zu beeinflussen. Der Standardwert liegt bei 500 und sollte für die meisten Anwendungsfälle geeignet sein. Falls die Korrekturen jedoch zu stark sind kann es hilfreich sein diesen Wert zu verringern. Über Relay threshold kann gesteuert werden ab wann die Montierung angesteuert wird, um das zu trackende Objekt im Regelbereich der AO-7 zu halten, falls es diesen zu verlassen droht. Bei eingeschalteter Adaptive Gain Option wird die Aggressiveness automatisch nachgeregelt. Es empfiehlt sich diese Option erst zu aktivieren wenn man bereits Erfahrung mit der AO-7 gesammelt hat.
Kalibrierung
Es sollte zu erst die oben beschriebene Kalibrierung der „normalen“ Trackingfunktion durchgeführt werden, damit CCDOPS die Montierung korrekt ansteuern kann, falls das zu trackende Objekt aus den Regelbereich der AO-7 herauslaufen sollte. Anschließend kann die Kalibrierung der AO-7 gestartet werden bei der die Spiegeleinheit der AO-7 maximal in alle Richtungen ausgelenkt und fünf aufeinanderfolgende Aufnahmen erstellt werden um den Regelbereich der AO zu bestimmen. Aufgerufen wird die Kalibration der AO-7 über
AO -> Calibrate...
woraufhin das folgende Menü erscheint bei dem die Belichtungszeit und der zu verwendende CDD-Sensor ausgewählt werden kann. Zusätzlich besteht noch die Möglichkeit den Kalibrationsvorgang zum Zwecke des Debuggens aufzuzeichnen. Des Weiteren empfiehlt es sich die Option Calibrate from Corner zu aktivieren, da diese bessere Resultate ermöglicht.

Die folgende Abbildung (sehr ähnlichen zur „normalen“ Guidingfunktion) zeigt das erzielte Kalibrationsergebnis, welches in diesem Fall qualitativ zwischen einem idealen und einem typischen Kalibrationsergebnis der AO-7 liegt. Im Prinzip gilt hier dasselbe was bereits oben für das „normale“ Guiding angeführt wurde.

Self Guiding
Ist die Kalibrierung abgeschlossen kann über
AO -> Self Guide...
das Self-Guide-Menü aufgerufen werden.
Unter Exposure time ist die angepeilte Belichtungszeit für den Imaging-CCD anzugeben. Die Track time gibt die Belichtungszeit für den Tracking-CCD an, welche im Vergleich zum Standardguiding deutlich kleiner sein kann, da sich die AO-7 sehr viel schneller regeln lässt. Die minimale Track time ist 0.001 Sekunden hierbei muss jedoch beachtet werden, dass die integrierte Countzahl des Guidestars wenigstens eintausend betragen sollte. Unter Track Box kann die Größe der Nachführbox um den Guidestern ausgewählt werden. Hierbei kann zwischen Small (4×4 Pixel), Medium (8×8 Pixel), Large (16×16 Pixel) und Huge (32×32 Pixel?) gewählt werden. Je kleiner die Nachführbox desto besser ist das Guidingresultat, jedoch kann der Guidestern bei schlechtem Seeing auch schneller aus der Nachführbox „herrausspringen“. Da das Seeing bei uns in der Regel relative schlecht und die Large Nachführbox nicht für unser Teleskop geeignet ist, wird die Medium Nachführbox normalerweise die beste Wahl sein. Die Dither Exposure Option dient dem debuggen und sollte daher normalerweise ausgeschaltet bleiben.

Nach einer Bestätigung mit OK wird eine Aufnahme mit der Nachführ-CCD erstellt und samt des Statusmenüs (siehe Abbildung unten) dargestellt. Auf dieser Aufnahme kann der gewünschte Guidestern durch verschieben des kleinen Kästchens auf eben diesen ausgewählt werden. Durch bestätigen mit Resume startet der Trackingprozess.

Das Self-Guide-Statusmenü gibt z.B. Aufschluss über die Guide Rate welche angibt wie häufig die Korrekturen über die AO-7 erfolgen. In der Regel gilt je höher dieser Wert ist desto besser ist das Guiding. Dies kann entweder über kürzere Belichtungszeiten oder kleinere Nachführboxen erreicht werden. Die AO Position gibt die Auslenkung des AO-Spiegels an, wobei die Nullstellung bei 50% x 50% liegt. RMS Wander gibt Auskunft über die momentane Leistungsfähigkeit des Guidings, wobei kleinere Werte besser sind. Das Ziel ist diesen Wert nach Möglichkeit zu minimieren. Total Counts ist die aktuelle und anfängliche über die Nachführbox aufsummierte Countzahl. Wenn im Setupmenü Adaptive Gain aktiviert wurde kann man unter Adapt. Gain die angewendeten Verstärkungsfaktoren ablesen.
Die Option Fan On ermöglicht den Lüfter der CCD-Kühlung abzuschalten, falls dieser das Teleskop zu Schwingungen anregt was bei unserem Verbund jedoch nicht der Fall sein dürfte. Über die AO Enable Option kann der Guidingvorgang mit der AO-7 falls gewünscht unterbrochen werden. Mit Hilfe der Slew Rate und der Aggressiveness lässt sich der Guidingvorgang optimieren und der RMS Wander minimieren. Zuerst sollte die Aggressiveness variiert werden. Springt der Guidestern z.B. hin und her oder oszilliert dieser sogar kann eine Reduktion der Aggressiveness Abhilfe schaffen. Auf jeden Fall sollte man jedoch den Wert des RMS Wander im Auge behalten. Nach dem die Aggressiveness angepasst wurde kann die Slew Rate variiert werden, welche den Grenzwert für die Bewegung des AO-7-Spiegels angibt. Hierbei bittet sich an die Slew Rate solange zu erhöhen bis der Wert des RMS Wander steigt und dann anschließend die Slew Rate wieder leicht zu reduzieren. Springt der Guidestern hin und her kann ebenfalls eine Reduktion der Slew Rate helfen. Beachten sollte man auch, dass ein Großteil der Hochgeschwindigkeitsbewegung des Guidesterns in der Regel ignoriert werden kann, da diese nicht mit aufeinanderfolgende Aufnahmen korreliert und nur solche Variationen bei denen dies der Fall ist korrigiert werden können.
Ist man mit dem Guidingergebnis zufrieden kann über Start die Aufnahme mit dem Imaging-CCD gestartet werden.